修改现有机器人
现在你已经能在 Onshape 中自如地浏览模型了,是时候看看 Onshape 如何帮你的团队做出更好、更有竞争力的机器人了。
假设你的团队正在制作一个能捡起和发射圆盘的机器人。为了提高效率,一组队员负责底盘装配(Drivetrain),另一组负责进球/发射器装配(Intake/Launcher)。一切进展顺利,直到你把完整机器人组装起来开始测试……
出问题了

一切看起来都不错,但在测试中,黄色圆盘总是卡在进球系统里。很难看清问题出在哪,因为卡盘发生在机器人底部,而且只有机器人移动时才会出现。
工程师使用 CAD 的一个重要方式就是发现设计中的问题。
用视图方块(View Cube),你可以切换到机器人的底部视图,看到问题所在:底盘组做了导向板来引导圆盘进入进球系统,但它们靠得太近了,导致圆盘卡住。让我们用 Onshape 来解决这个问题。
建议先复制一份文档到自己账号下再操作
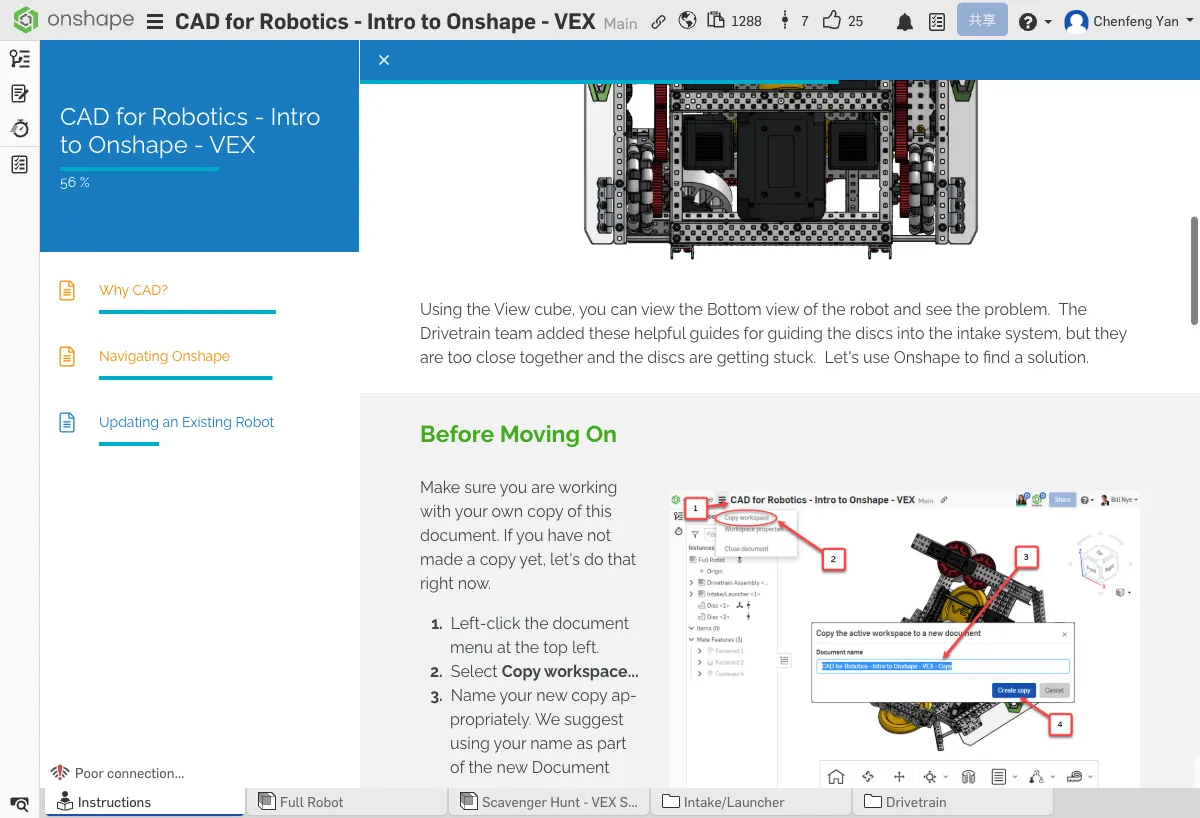
- 点击左上角的文档菜单
- 选择 Copy workspace…
- 给新副本起一个名字(建议用你的名字作为文档名的一部分)
- 点击 Create copy
现在你在自己的副本中工作了!
左上角的文档名应该包含你的名字,而且显示的是你自己的工作区
没关系,这步很多人都会遇到问题!
确认你点的是左上角的文档菜单(三条横线图标),然后选 Copy workspace。如果看不到这个选项,可能是你在教程原始文档里,不是你自己的副本。
配合就是告诉 Onshape:"把这个零件的这个点,对齐到那个零件的那个点上。"就像拼乐高——你选两个连接点,Onshape 自动对齐。选错了点?零件就飞了。没关系,Ctrl+Z 撤销重来。
- Ctrl+Z 撤销 — 90% 的错误撤销就能解决
- 检查选点 — 你选的白色圆点在正确位置吗?
- 删掉重做 — 右键 mate → Delete,重新做比调试快
更多排错方法看 急救手册
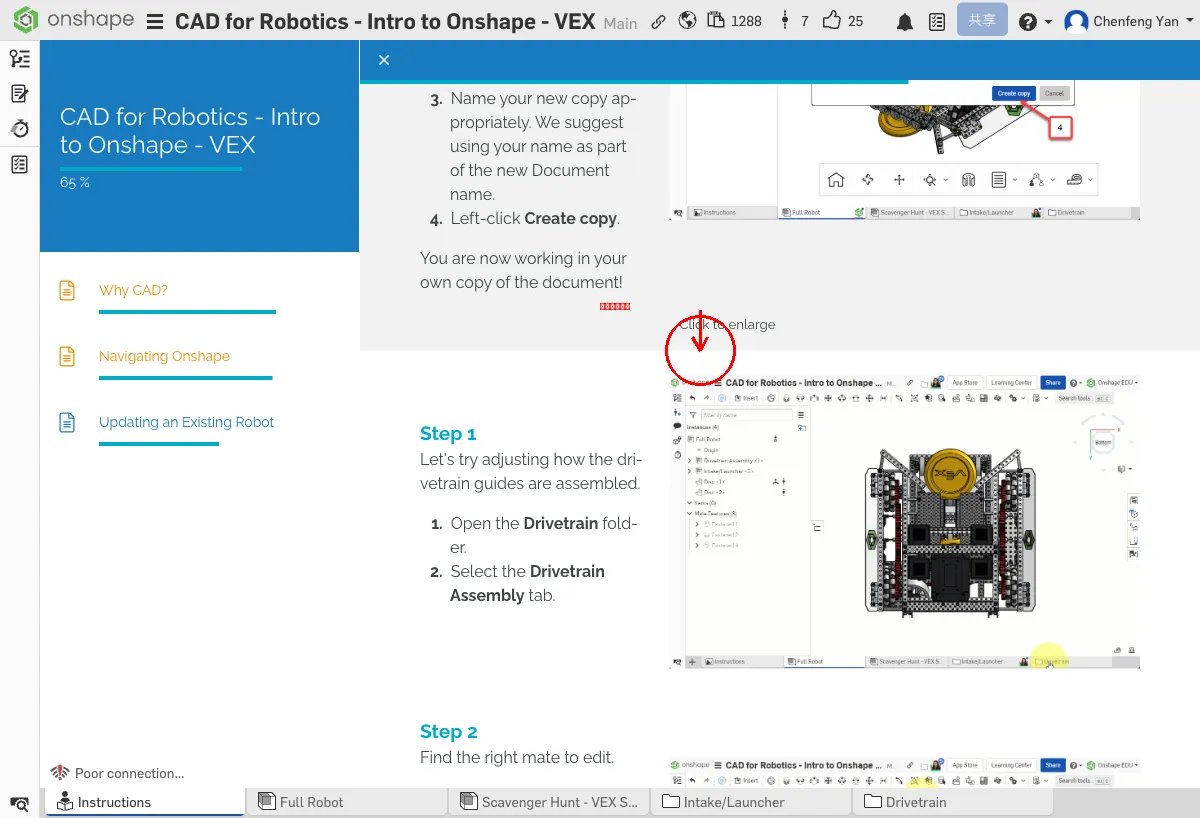
打开底盘装配体
让我们调整底盘导向板的装配方式。
- 打开 Drivetrain 文件夹
- 选择 Drivetrain Assembly 标签页
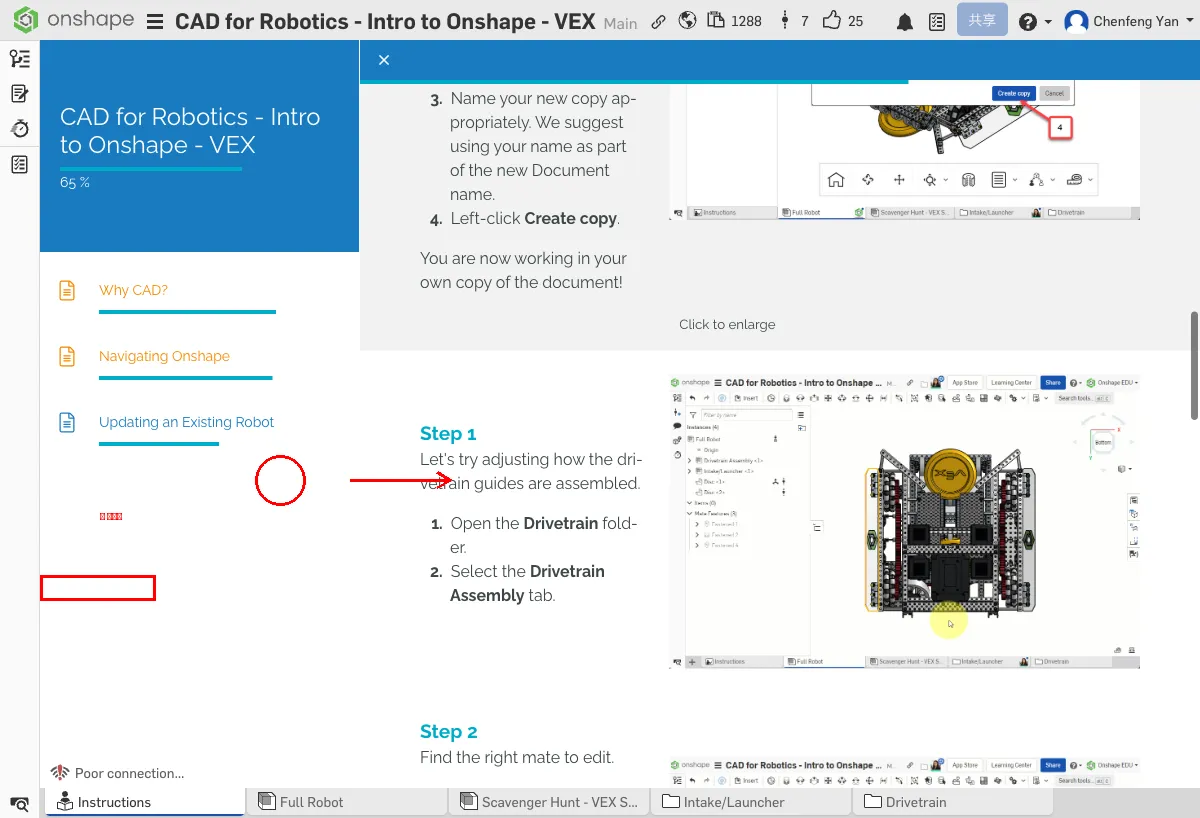
屏幕上应该显示底盘的 3D 模型,底部标签页高亮在 Drivetrain Assembly
没关系,这步很多人都会遇到问题!
如果看不到 3D 模型,试试:1) 按 F 键适应窗口 2) 检查底部标签页是否选中了 Drivetrain Assembly 3) 确认左侧面板的零件没有被隐藏(眼睛图标)
找不到 Drivetrain 文件夹?
点击左侧面板的文件夹图标展开目录树,Drivetrain 在根目录下。
底部没有看到标签页?
把页面往下滚,标签页在 Onshape 窗口最底部。如果窗口太小可能被遮住了。
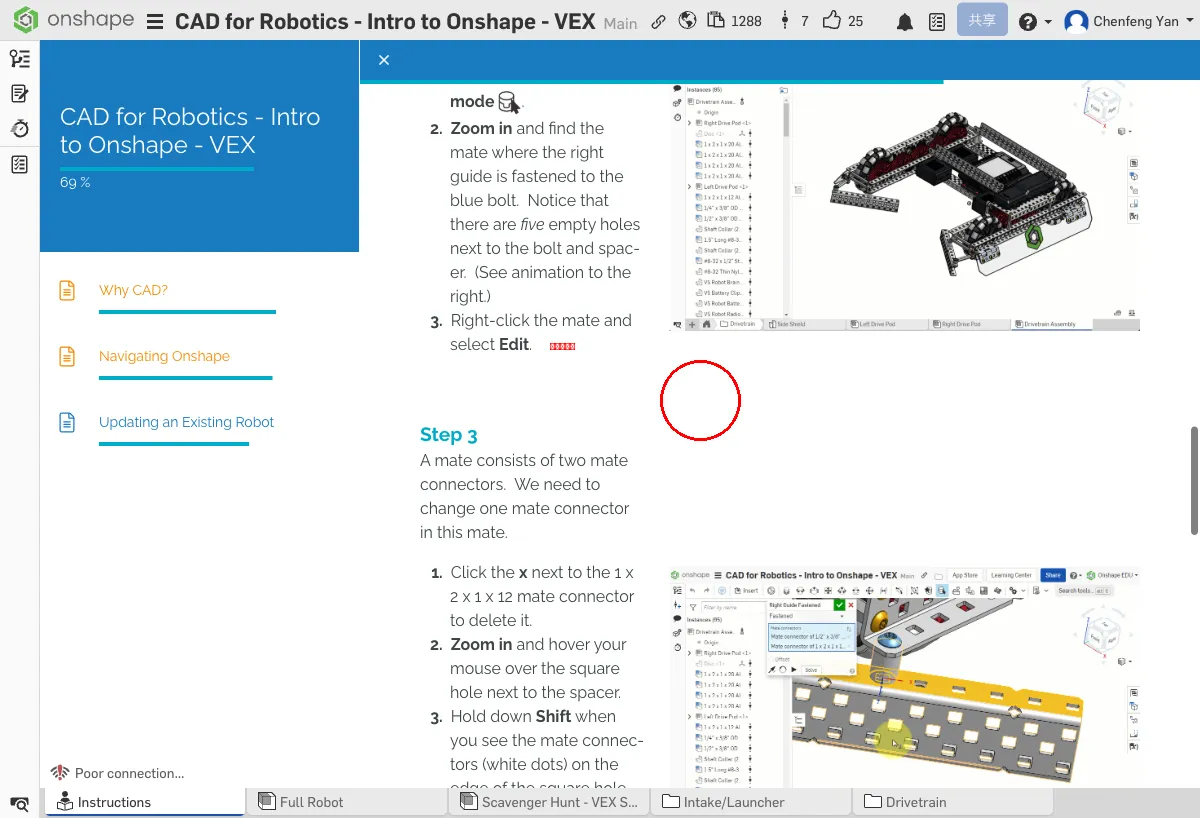
找到要编辑的配合关系
- 开启 Show mates mode(显示配合模式)
- 放大找到右侧导向板与蓝色螺栓连接的配合关系。注意螺栓和垫片旁边有五个空孔(参考动画)
- 右键点击该配合关系,选择 Edit(编辑)
应该能看到一个弹出窗口,里面显示两个 mate connector,旁边有蓝色螺栓和五个空孔
没关系,这步很多人都会遇到问题!
如果右键没反应:1) 确认你开了 Show mates mode 2) 放大到螺栓附近才能看到配合图标 3) 配合图标是蓝/绿色小圆点,不是零件本身
看不到 Show mates mode 按钮?
在右上角工具栏找一个像连接点的图标,或者在菜单栏 View → Show Mates。
右键点击没反应?
确保你点的是配合关系的图标(蓝色/绿色小圆点),不是零件本身。需要先开启 Show mates mode 才能看到配合图标。
找不到正确的配合?
放大到导向板和蓝色螺栓的连接处,配合图标在螺栓上面。数一数旁边有几个空孔 — 应该是五个。
修改配合连接点
一个配合由两个配合连接器(mate connector)组成。我们需要更换其中一个。
- 点击 1 x 2 x 1 x 12 配合连接器旁的 x 删除它
- 放大,将鼠标悬停在垫片旁边的方孔上
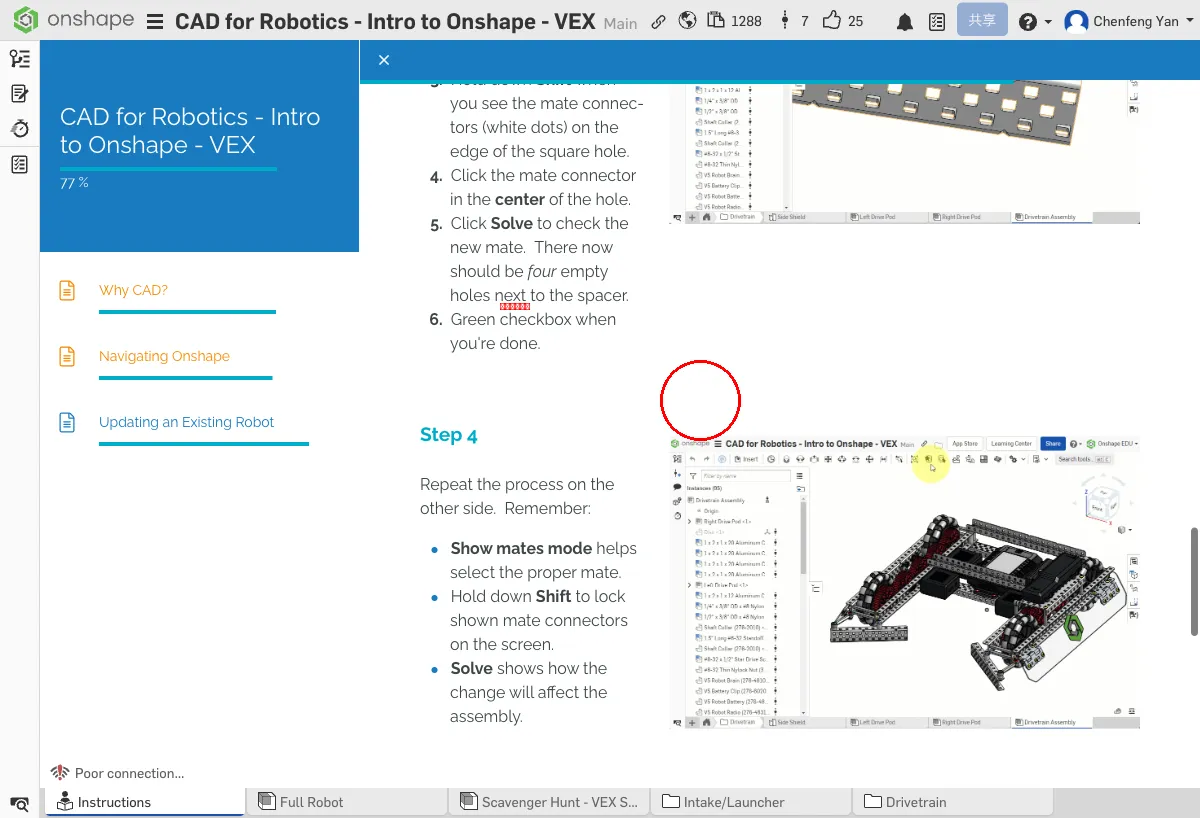
- 看到配合连接器(白色圆点)出现在方孔边缘时,按住 Shift
- 点击方孔中心的配合连接器
- 点击 Solve 检查新配合。现在垫片旁边应该只有四个空孔了
- 完成后点绿色对勾确认
点 Solve 后,垫片旁边应该只剩四个空孔(之前是五个)。如果没变,重新检查选的 mate connector 是否在方孔中心
按 Shift 后看不到白色圆点?
鼠标需要先悬停在方孔边缘,等白色圆点出现后再按 Shift。如果还是看不到,试试放大到更近。
Solve 后还是五个空孔?
说明你选错了 mate connector。点 Undo(Ctrl+Z)撤销,重新选方孔中心的那个白点,不是边缘的。
做错了怎么撤回?
按 Ctrl+Z(Mac 上是 Cmd+Z)可以撤销上一步操作。不用担心搞坏模型。
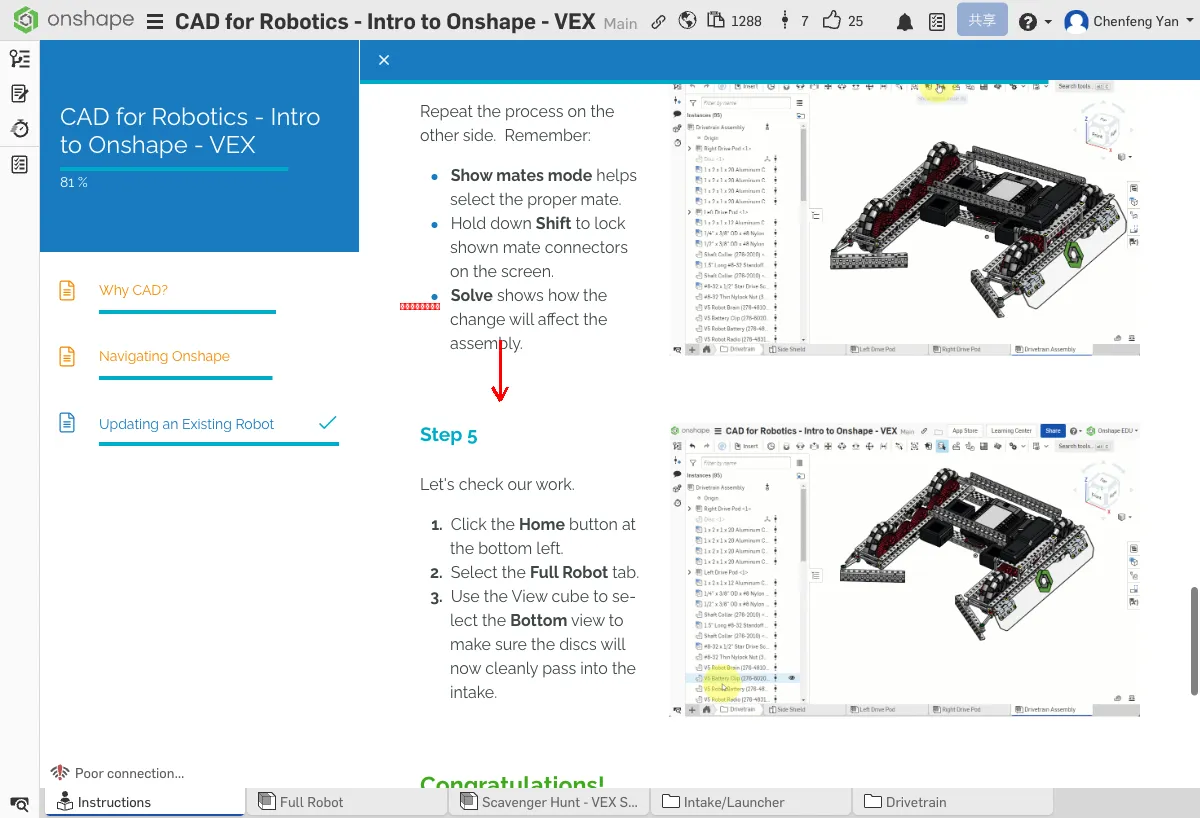
对另一侧重复操作
在另一侧重复同样的过程。记住:
- Show mates mode 帮你选中正确的配合
- 按住 Shift 可以锁定屏幕上显示的配合连接器
- Solve 可以预览修改对装配体的影响
两边的导向板应该都往外移了一个孔位,给圆盘留出更多空间
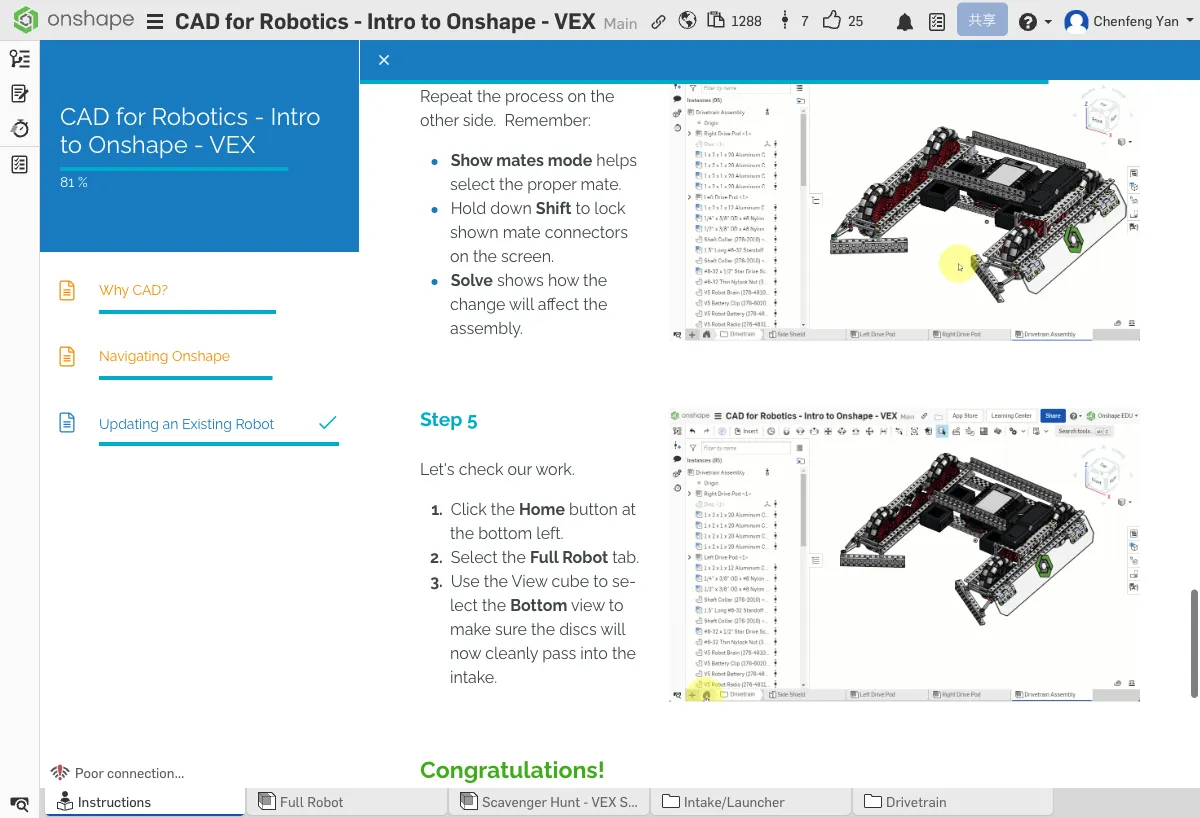
检查修改结果
让我们验证一下修改是否成功。
- 点击左下角的 Home 按钮
- 选择 Full Robot 标签页
- 用视图方块切换到 Bottom(底部)视图,确认圆盘现在能顺利通过进球系统
两个导向板之间的间距应该比之前宽了,黄色圆盘能顺利滑入进球系统
修改前 vs 修改后
恭喜完成!
在 Onshape 中建好机器人模型,让设计排查变得又快又方便。底盘组现在可以迅速修改设计,继续测试了。
你已经学会了 Onshape 的三个核心技能:理解 CAD 的价值、浏览和操作模型、修改装配关系。
小测验
当零件位置不对时,你需要编辑什么来调整?
本章你学了什么
- 用 View Cube 切换视角发现设计问题
- 编辑 Mate 可以调整零件位置
- 修改前先复制文档到自己账号